Table of Contents >> Show >> Hide
- Why This Build Captures So Much Attention
- What Makes A Rubik’s Cube So Hard To Automate?
- From External Solvers To A Cube That Solves Itself
- The Engineering Stack Inside A Self-Solving Cube
- The Problems Nobody Sees In The Final Video
- Why Building One Is Worth It Anyway
- Conclusion
- Extended Experience: What Building One Actually Feels Like
- SEO Tags
Some people solve a Rubik’s Cube with fast fingers, nerves of steel, and the kind of pattern recognition that makes the rest of us feel like we’re trying to untangle spaghetti with oven mitts. But a different kind of genius looks at the cube and thinks, “What if the cube handled this whole situation itself?” That is where things get gloriously weird. A self-solving Rubik’s Cube is not just a toy hack. It is a tiny robotics problem, a mini computer science project, a packaging nightmare, and a mechanical engineering flex all rolled into one colorful little cube.
The idea sounds simple enough: scramble the cube, set it down, and watch it twist its own faces until order returns. In practice, though, building a Rubik’s Cube that solves itself means squeezing motors, sensors, power, control logic, and solving software into a shape that was never exactly designed to become a robot. It is the kind of challenge that attracts makers, hackers, roboticists, and puzzle obsessives for the same reason moths love porch lights: they know this might end badly, but they absolutely must get closer.
This is what makes the topic so fascinating. A self-solving Rubik’s Cube sits at the intersection of classic puzzle culture and modern embedded systems. It takes a beloved brain teaser from the 1970s and turns it into a living demonstration of actuation, sensing, algorithm design, and spatial problem-solving. It is half magic trick, half engineering thesis, and fully capable of making a smart person mutter, “Why is this tiny gear on the floor again?”
Why This Build Captures So Much Attention
The Rubik’s Cube has always been more than a toy. It is a symbol of logic, patience, symmetry, and mild emotional damage. People love it because it looks approachable while quietly hiding an absurd amount of complexity. That is exactly why self-solving cube projects feel so impressive. They take an object already famous for frustrating humans and give it a mechanical nervous system of its own.
There is also a showmanship factor here that is impossible to ignore. A robot arm solving a cube is cool. A cube solving itself is cooler. One looks like automation. The other looks like sorcery with a battery. The difference matters. External cube-solving robots are amazing engineering projects, but a true self-solving cube feels uncanny because the intelligence appears to live inside the puzzle itself. It is the same reason people are more amazed by a self-balancing sculpture than by a guy standing nearby with a controller.
And then there is the educational angle. A project like this forces builders to deal with real-world tradeoffs. You cannot hide behind a slick simulation or a giant desktop setup. Everything has to fit. Everything has to work together. And everything has to survive inside a tiny moving object whose parts already fight for space before you add electronics. That makes the self-solving cube one of the most elegant “learn by suffering” projects in modern DIY engineering.
What Makes A Rubik’s Cube So Hard To Automate?
A Tiny Puzzle With Enormous Complexity
A standard 3×3×3 Rubik’s Cube is small enough to toss in a backpack, yet it has more than 43 quintillion possible configurations. That absurd number is part of the cube’s mystique. It means the puzzle does not become manageable through random guesswork unless your retirement plan includes several lifetimes and a snack cart. It also means any self-solving system needs a reliable way to understand the current state and calculate a valid path back to solved.
That does not mean the cube is unsolvable in a theoretical sense. Mathematicians and computer scientists famously showed that every legal cube position can be solved in 20 moves or fewer under the standard half-turn metric, a result commonly called God’s Number. That finding matters because it reminds builders that the real challenge is usually not whether a solution exists. The challenge is how to detect the cube’s state, compute a useful solution quickly, and physically perform that solution without the cube slipping, jamming, or deciding to explode into small plastic confetti.
Solving Is One Problem, Turning Is Another
This is where beginners often underestimate the build. On paper, solving a cube is a software problem. In real hardware, it becomes a choreography problem. A face must turn exactly far enough, stop cleanly, and leave the rest of the mechanism aligned well enough for the next move. If one face lands slightly off-angle, the neighboring faces may bind. If the torque is too weak, the move stalls. If the torque is too strong, something strips, snaps, or launches itself toward the nearest piece of furniture.
In other words, a self-solving cube is not just about algorithms. It is about repeatable movement under tight constraints. A good build needs precise actuation, dependable feedback, and enough processing power to keep track of what is happening in real time. This is robotics in miniature, which is another way of saying it is adorable and mean.
From External Solvers To A Cube That Solves Itself
The Era Of Fast Cube-Solving Robots
Before makers started hiding machinery inside the cube, most famous cube-solving machines were external robots. These systems gripped the cube from the outside, used cameras to identify the colors, ran a solving algorithm, and then blasted through the moves with terrifying speed. MIT students famously built a robot that solved a cube in 0.38 seconds. Later, Purdue students pushed the benchmark even further with a record-setting system that solved one in 0.103 seconds. Those machines are engineering marvels, but they operate like pit crews around the cube rather than turning the cube into the robot itself.
That distinction is important. External solvers have more room for cameras, motors, structural rigidity, cooling, and computation. They can afford brute force in ways a self-contained cube cannot. If your robot lives on a tabletop frame, you can add hardware until the problem gives up. If your robot has to fit inside a cube that still looks and moves like a cube, every extra gram and every extra millimeter becomes a negotiation.
The Leap To A True Self-Solving Cube
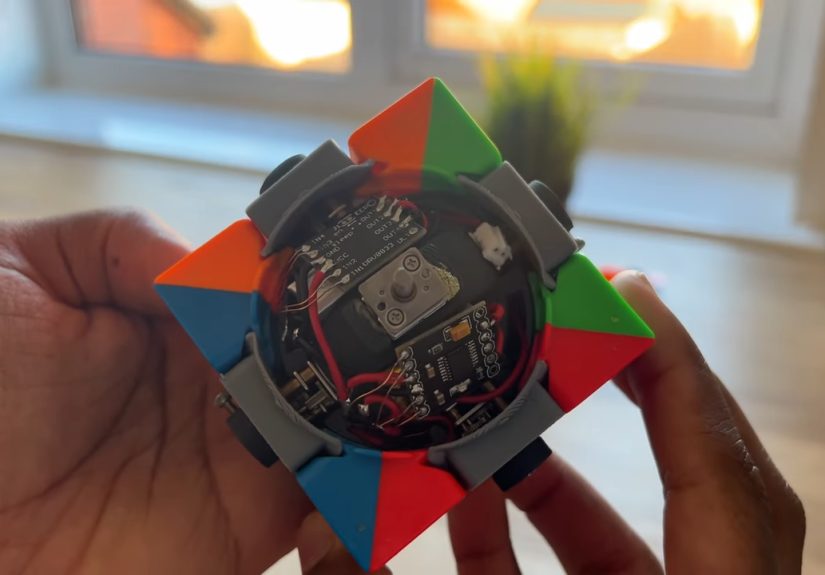
That is why projects like Smart3 and newer experimental builds have attracted so much attention. These designs move beyond a robot that solves a cube and toward a cube that appears to solve itself. In one notable build, six sets of gears, motors, motor drivers, rotary position sensors, a microcontroller, a battery, and an accelerometer were all packed inside the cube, allowing it to recognize when it was placed on a desk and begin solving on its own. Another recent experimental build described by the maker press used five gear motors in the cube’s core, controlled by an ESP32 and motor drivers, while the creator worked through the thorny issue of internal feedback and face position tracking.
This is the real frontier: not just solving quickly, but solving elegantly from inside the puzzle. It is less about setting speed records and more about making the impossible look casual.
The Engineering Stack Inside A Self-Solving Cube
1. Actuation: Making The Faces Turn
A normal Rubik’s Cube turns through a clever internal mechanism centered on rotating shafts and interlocking pieces. A self-solving version has to hijack that geometry without destroying it. Builders typically do this by connecting miniature motors to the face shafts through gears. That sounds tidy until you remember there are six faces, almost no empty space, and a constant need to preserve enough strength for the cube to survive repeated turns.
The actuation system has to deliver enough torque to move the face reliably while staying small enough to fit within the core. If the motors are too large, they will not fit. If they are too weak, the cube will hesitate like it has stage fright. If the gear train introduces too much backlash, the face will miss alignment. This is why some builders end up disassembling tiny servos just to salvage the motors and gears they need. It is part engineering and part extremely confident surgery.
2. Sensing: Knowing What The Cube Looks Like
Most external cube-solving robots use cameras or color sensors. That works nicely when the robot lives outside the puzzle and can look at all six faces. Inside a self-solving cube, camera-based vision is much harder to fit. Some makers have instead used rotary position sensors to track the angle of each face. If the system monitors every twist from the moment power is on, it can keep an internal record of the cube’s state without needing to “look” at the stickers the way an external robot would.
This is a clever tradeoff. It removes the need for bulky vision hardware, but it also creates a new problem: the cube must know its starting orientation accurately, and it must never lose track of any move. A single mistaken turn count can poison the entire state model. Once that happens, the algorithm is solving a cube that exists only in memory, while the real cube sits on the desk being wrong in six colors at once.
3. Computation: Picking A Solve Strategy
A self-solving cube also needs a brain. On larger robots, a computer can calculate a short solution using a search-heavy solver. Inside the cube, resources are tighter. That is why the choice of solving method matters. Some systems use Kociemba-style two-phase solving because it is efficient and widely trusted in cube software. Others use more human-like methods such as CFOP, which may produce longer move sequences but can be easier to implement on constrained hardware and easier to map into predictable motion routines.
That tradeoff is more interesting than it looks. The shortest mathematical solution is not always the best mechanical solution. A tiny onboard controller may benefit from an approach that is simpler to compute or gentler on the hardware, even if it uses more moves overall. On a self-solving cube, elegance is not measured only in move count. It is also measured in whether the cube finishes the performance without coughing up a spring.
4. Power: The Invisible Villain
Then comes power, the least glamorous and most stubborn character in the whole story. Batteries take space. Motors draw current. Repeated actuation creates heat. Wiring adds clutter and fragility. The more ambitious the build, the more the power budget starts acting like a grumpy accountant. You want six motors? Fine. Then explain your battery size. You want fast moves? Lovely. Show me your thermal plan. You want safety margins? Congratulations, now you need room for better electronics and current control.
Power design is where many “looks great in CAD” dreams meet reality. A beautiful mechanism is still a paperweight if the battery sags, the motor driver browns out, or the current spikes chew through something expensive. Tiny robots are ruthless that way.
The Problems Nobody Sees In The Final Video
When people watch a self-solving cube online, they usually see the fun part: scramble, pause, twist-twist-twist, applause. What they do not see is the long list of irritating, deeply educational problems that happen before the camera ever rolls.
First there is alignment drift. Rubik’s Cube faces must stop at clean quarter turns. Close enough is not enough. A few degrees off, and the next face may refuse to rotate. Then there is friction variation. One face may spin freely while another drags because of manufacturing tolerances, print quality, wear, or assembly pressure. Next comes cable routing and board placement. Electronics do not politely flatten themselves because you asked nicely. They occupy volume, resist ideal layouts, and become dramatically more annoying when the thing around them keeps rotating.
There is also software-hardware mismatch. A solver can calculate a perfectly valid sequence of moves that turns out to be mechanically awkward for a specific build. The code says “easy.” The gearbox says “absolutely not.” So builders iterate. They change motion order, add pauses, soften acceleration, revise mounting points, redesign internal pieces, and keep going until the cube becomes less of a prototype and more of a performer.
That ugly middle stage is the real story of projects like this. The final result feels magical because it compresses months of debugging into thirty seconds of clean motion.
Why Building One Is Worth It Anyway
Because a self-solving cube is one of those rare projects that teaches nearly everything at once. It teaches mechanism design because every millimeter matters. It teaches electronics because sensors, drivers, batteries, and controllers must cooperate in a hostile little package. It teaches software because state tracking and solving logic cannot be sloppy. And it teaches humility because the cube will eventually reveal one more issue you did not think about, usually late at night.
It also demonstrates something deeper about modern maker culture. The coolest builds are not always the biggest, fastest, or most expensive. Sometimes the most captivating project is the one that takes a familiar object and quietly turns it into an impossible machine. A Rubik’s Cube that solves itself does exactly that. It transforms a classic puzzle into a tiny autonomous system and reminds us that playful engineering is still some of the best engineering there is.
Conclusion
Building a Rubik’s Cube that solves itself is the kind of idea that starts as a joke, turns into a sketch, and ends with someone ordering very small parts and making very large promises. But the concept is far more than a gimmick. It is a compact showcase of robotics, embedded systems, mechanical precision, and algorithmic intelligence. The challenge is not just solving a cube. It is building a machine small enough, smart enough, and stubborn enough to solve the cube from the inside out.
That is why the best self-solving cube projects feel so satisfying. They do not simply automate a puzzle. They reinvent the puzzle as a robot. And in a world already full of flashy tech demos, there is still something wonderfully charming about a little plastic cube that sits on a desk, thinks for a moment, and fixes its own mess. Honestly, many adults could take notes.
Extended Experience: What Building One Actually Feels Like
The experience of working on a self-solving Rubik’s Cube is usually less like a dramatic movie montage and more like a very polite argument between physics, patience, and tweezers. At first, the project feels charmingly manageable. You think, “It’s just a cube.” Then the cube reminds you it contains six rotating faces, tightly shared geometry, almost no free volume, and a long-standing personal grudge against easy assembly. That is when the real experience begins.
Early progress tends to be wildly encouraging. A motor spins. A gear meshes. One face turns. Suddenly the dream feels real, and your brain starts jumping ahead to the day you will place the cube on a table and watch it solve itself while everyone around you acts like you have invented wizardry. But prototype life has a way of humbling that confidence. The second face binds. A wire interferes with rotation. The battery fits in the CAD model but not in the actual cube because the real world does not respect optimism. A sensor reads beautifully on the bench and then starts behaving like it is haunted the moment the mechanism vibrates.
And yet, that friction is exactly what makes the experience memorable. Every improvement feels earned. When a face begins stopping at a clean 90 degrees instead of overshooting, that is not a tiny step. It feels like a parade. When state tracking survives a full scramble without losing orientation, you suddenly trust the project in a whole new way. The magic of the experience is that the build teaches you to celebrate details ordinary people never notice. A slightly better bearing surface becomes thrilling. Cleaner cable routing feels like art. A shorter pause between moves feels like character development.
There is also a strange emotional arc to the project. During the hard moments, the cube feels petty. It seems to resist improvement out of spite. But the first time the mechanism performs multiple correct moves in sequence, the whole thing changes. It no longer feels like a pile of parts. It feels alive in the engineering sense. You are no longer forcing motion into plastic. You are watching a system behave. That moment is addictive, and it is why so many makers keep refining these machines even after they technically “work.”
Another memorable part of the experience is how multidisciplinary it becomes without asking permission. You may begin with interest in electronics and end up learning about gear trains. You may start with software and discover that mechanical tolerances are now your personality. You may care only about the cube solving fast, then realize that reliability, repeatability, and recoverability matter even more. In that sense, a self-solving Rubik’s Cube is one of the best small-scale engineering classrooms imaginable. It does not let you stay in one specialty for very long.
Most of all, the experience is fun in the richest sense of the word. Not easy fun. Not casual fun. The other kind. The kind where you wrestle with a problem that is slightly ridiculous, technically demanding, and completely unnecessary in the best possible way. Nobody urgently needs a Rubik’s Cube that solves itself. That is exactly why building one is so satisfying. It is proof that curiosity still matters, that craftsmanship still surprises people, and that a playful idea can still push serious engineering forward. Also, it is a great excuse to say the sentence, “Please hand me the miniature gearbox for my autonomous puzzle cube,” which is objectively excellent.